
引言#
最近几天读了SLAM-Former: Putting SLAM into One Transformer ↗这篇很近很近的工作,本文笔记记录用于后续翻阅学习
首先,SLAM-Former与之前读到的所有论文相似,都是致力于从RGB图像序列中恢复三维场景结构和相机位姿等属性的工作。但是与之前的工作(包含一个冗长复杂的pipeline)不同, SLAM-Former对已有的transformer架构进行了大胆的改进,使之更适合进行重建任务,并在实验中得到了competitive的结果。
模型结构#
据作者所述, SLAM-Former的主要pipeline由frontend和backend两部分组成,至于模型的backbone,SLAM-Former建立在一个Transformer架构之上, 而这个Transformer aggregate了intraframe和interframe的信息,并使用task specific heads预测不同的三维属性。 值得注意的是, 这个Transformer的输入与类似,对所有的输入的image token共享一个相同的register tokens 从而使模型不依赖于一个不稳定的reference frame。
模型的backbone包含了层组合了intra-frame attention和inter-frame attention 来联合捕捉图像内容和图像之间的关系。
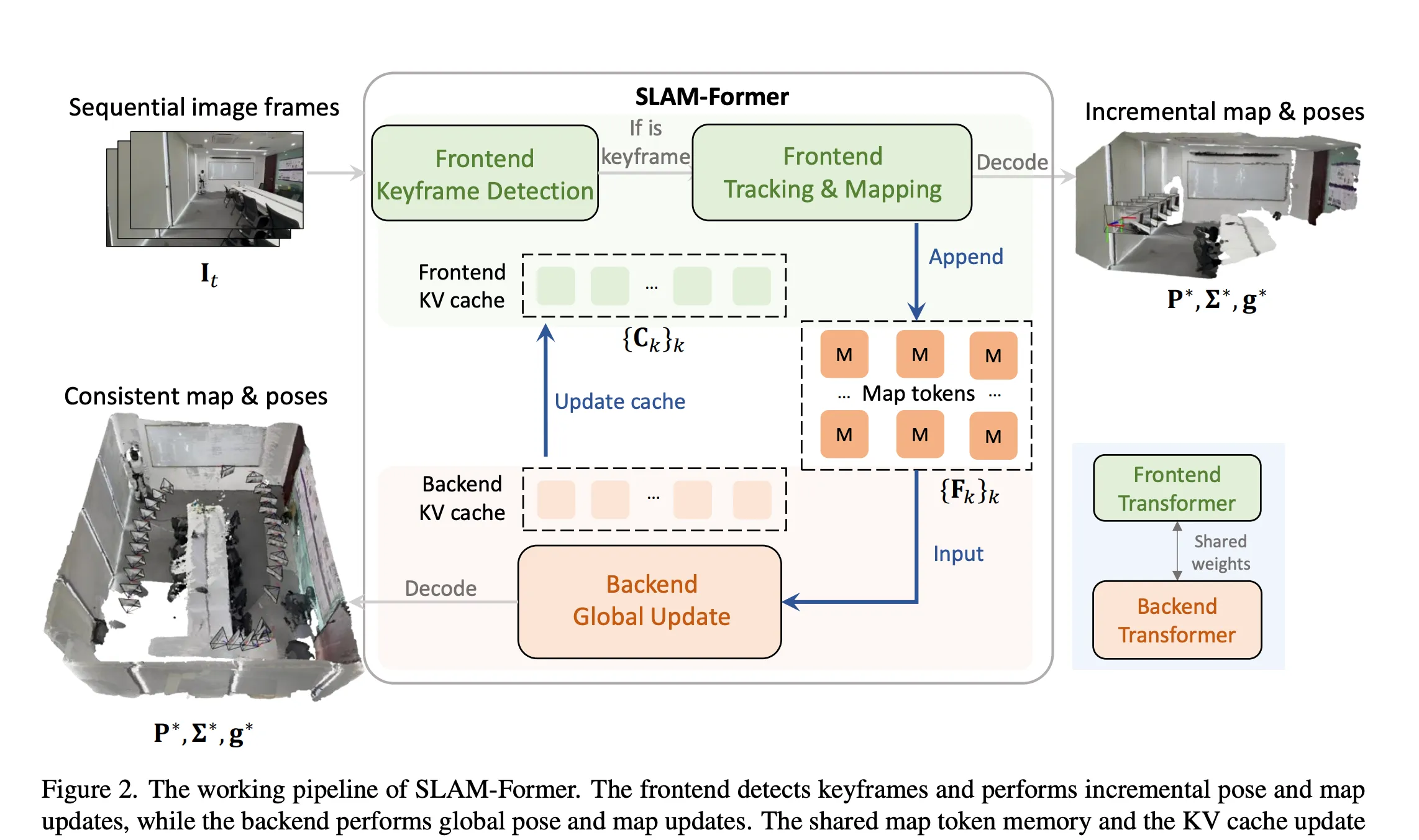
此外,Front end部分负责增量式的逐帧重建,back end负责全局的点云对齐和相机优化,他们共享一个 Transformer backbone。
Front end#
图中大部分内容都是front end的处理细节,当一个新的frame输入时,frontend首先会 决定其是否为keyframe,如果是的话,则会进行进一步处理。
当给定一个frame sequence时,frontend将每一个frame映射到一个map token集合中:
这里, 表示之前keyframe的KV cache, , 代表着keyframe的索引集合,是当前frame的map token, 作为该frame的 一个隐式神经表示。 同时新的KV cache也通过产生, 也会视情况被扩充到中。
Keyframe detection#
在上一步中我们已经对当前帧generated了map token,接下来我们需要决定是否为keyframe.
作者采用了pose head来预测当前帧的pose:
当当前frame的relative pose与最近的keyframe的pose之间的差异大于一个阈值时, 则将当前frame标记为keyframe。
但是作者在论文里又表明,在检测frame是否为keyframe时,他们并没有依赖KV cache ,而是直接应用了来检测,就相当于之前的KV cache是将该图片 与所有的keyframe进行attention计算,而这里则是只与最近的keyframe进行attention计算。 这样增加了效率并且避免了选取一个特定的reference frame。(这里似乎我没怎么懂跟特定的reference frame有什么关系)
Front end tracking and mapping#
接着上一步,如果一个新的frame已经被认为是一个keyframe,我们就可以重新利用全部的KV cache来重新 计算他的map token, 并更新M, S.
好了, front end 到这里差不多结束了,作者说frontend只依赖于过去的keyframe, 使得其适合于online的tracking,然而, 这种处理顺序会导致误差累积和局部不一致, 为了解决这一问题,作者引入了一个back end模块来进行global refinement.
Backend#
Backend的主要任务是refine所有的frame来达到全局的一致性。传统的 SLAM系统通常会使用loop closure和bundle adjustment来实现这一点, 但是这些方法都非常的costly, 作为对比,作者使用了一个transformer-based的 back end来进行全局的优化。
作者认为这个设计的有效性在于backend transformer内部的full attention机制, 他的全局感受野使得模型能够完成误差纠正和结构一致性。
此外, 为了继承backend refinement的优势,frontend和backend共享了KV cache, 使得frontend能够受益于backend的全局优化。
Training Strategy#
与以往的一些论文不同,SLAM-Former的创新点不止在于模型架构,也在于一些训练策略。
作者的目标是使一个transformer同时胜任frontend和backend的任务,为了达到这个目标, 作者用三种模式联合训练,每一个模式都对应着不同的输入输出对。
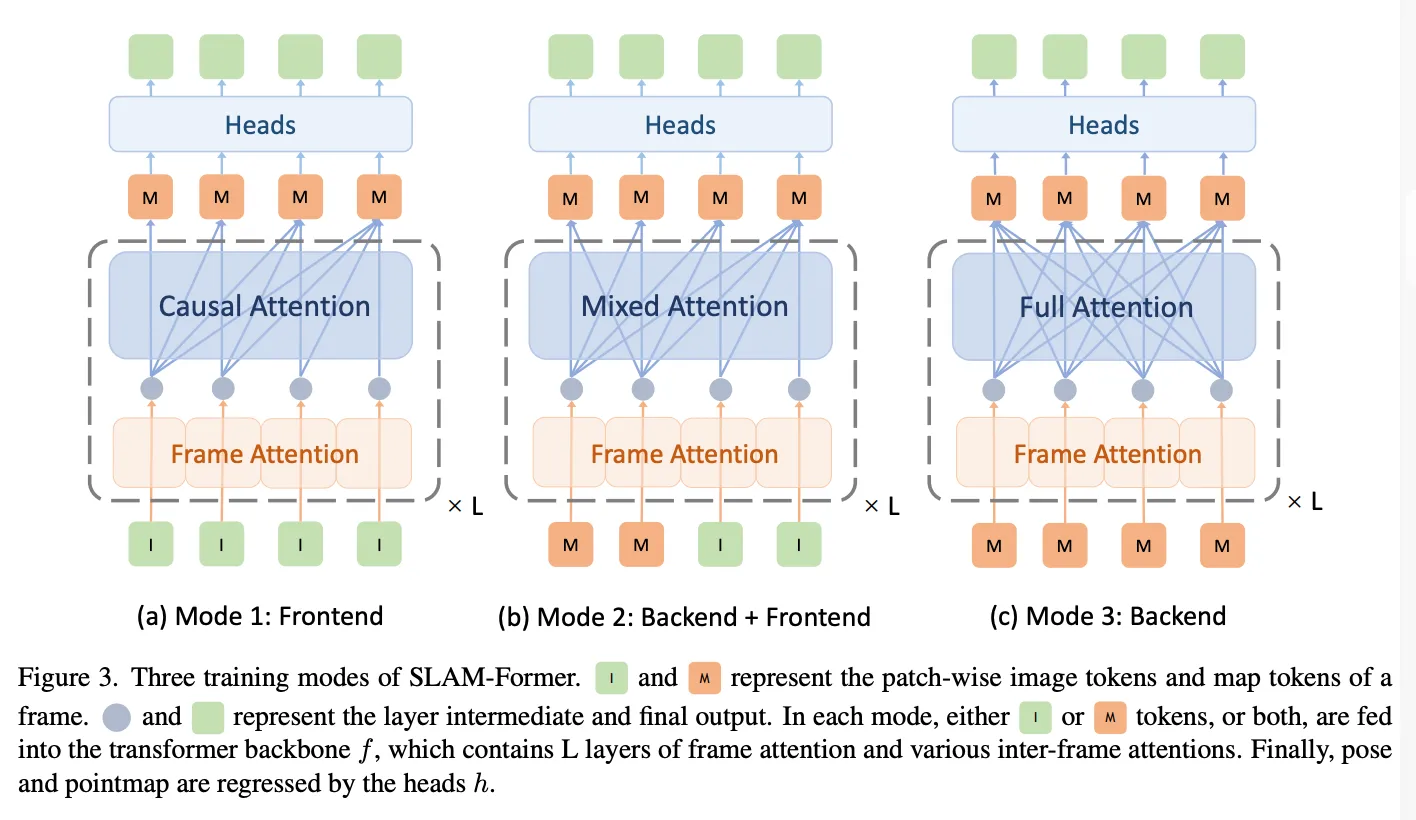
Training Frontend#
Frontend用了一个causal mask来确保每一个frame只能访问之前的keyframe。
然而,纯净的使用causal mask会自动的将第一帧作为reference frame, 作者又注意到党对两帧或更多帧进行联合操作时,没有单一的refernce frame, 这避免了后续帧需要与reference frame pose 相似的要求。
因此, 作者对前两帧使用了full attention,并同时对所有后续frame使用causal mask, 在这种情况下,inference时,keyframe detection将最后一帧关键帧和当前的输入帧进行处理, tracking and mapping时, 前两个keyframe则会联合处理决定全局坐标。
Training Frontend with Backend Cooperation#
为了在frontend和backend之间建立联系,作者使用maxed attention来模拟backend和 cache sharing的过程。
具体来说,采用混合注意力在一个统一的正向传播中同时完成地图精炼(后端/全注意力)和新数据处理, 并且前端的casual attention并非独立工作,而是以KV cache为条件,实现了高效且信息流一致的前端-后端协作,确保前端的实时处理结果能够立即对齐到后端修正后的全局结构。
woc这什么花式操作啊Training Backend#
作者最后使用full attention来训练backend transformer,
Joint Training#
在所有的三种模式中,三维属性均是由task specific heads 预测的:
但值得注意的是, 并不像其他的工作一样,SLAM-Former只预测每一帧的local pointmap 来避免设定一个特定的世界坐标系的需求,这倒是与非常相似。
剩下的loss函数都比较常规。 这三种模式都会在一个batch中共享权重依次训练。
Pipeline#
在图片和叙述过程中, pipeline已经是显而易见的,于是我便不再赘述。
Experimental Setup#
本模型有36层framewise 和 global attention相结合的transformer layer, 训了10个 epoch, 在32个A100 上训练了11小时。可以可以。
results#
模型在pose, tracking 和 reconstruction等任务上都达到了很好的指标。数据冗长不再多说。 值得一提的是作者对Front end 和 back end 的联系的理解。
back end assist front end无疑是显而易见的,但是作者还发现back end同样也 benefit from front end, 作者解释了是因为back end 使用了来自于frontend 的 implicit的顺序信息,从而使得back end能够更好地理解frame之间的关系。(迷)
总结#
总之,SLAM-Former通过对transformer架构的改进和训练策略的设计, 成功地实现了一个统一的模型来处理SLAM任务。
但SLAM-Former仍然存在一些局限性,比如说作者用full attention来替代传统的loop closure和bundle adjustment,受限于full attention的计算复杂度,模型难以处理非常长的序列, 其次,frontend 不支持一个local的inference, 因为在inference之前需要将所有的KV cache输入到frontend 中。
此外, 文章中没有提到的是,我去看他们的demo, 发现重建结果有很明显的分块化现象,目前不知是否与transformer的架构有关。
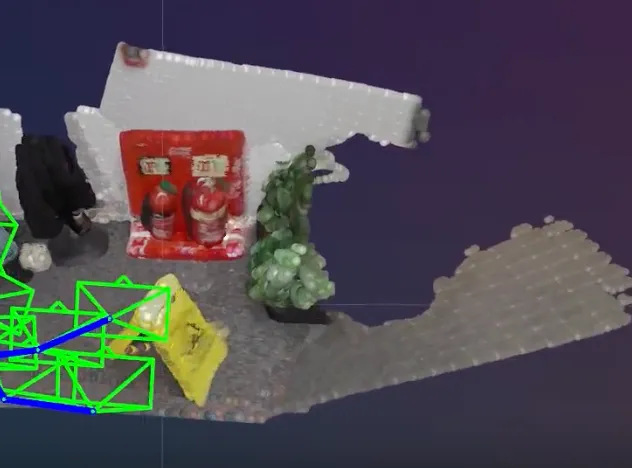
此文撰写的时候,SLAM-Former的代码尚未开源,期待后续的代码发布。
Waiting for api.github.com...