SLAM3R读后有感
最近几天读完了SLAM3R的论文,这是 2025 年 CVPR 的一 篇Highlight论文,也是我在 3R 方向的读过的第 3 篇论文。
这篇论文主要介绍了一个叫做SLAM3R的根据视频即时重建的系统,感觉是由DUst3R中获得的灵感,不同的是DUst3R是根据两张图片重建出三维点图,并且是离线处理;而SLAM3R是从一个单目视频中实时在线重建,并且相较于之前的一些方法具有极高的效率。
SLAM3R的主要模块
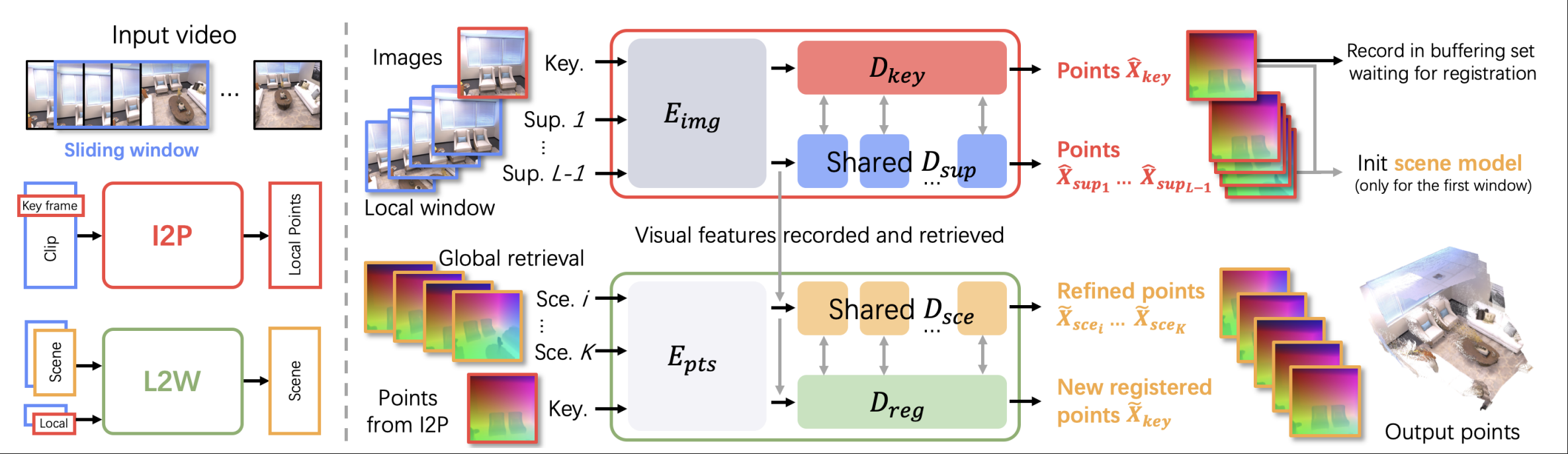
SLAM3R 主要由I2P和L2W两大模块组成,分别负责从视频中的关键帧重建点图(Image to Point)和利用点图增量式地重建全局点图( Local to World ), 具体结构如下:
视频预处理
首先, SLAM3R 采用了滑动窗口算法将视频拆成多个小片段,把多个小片段输入到 I2P 中进行处理。
I2P网络
I2P 模块接受预处理产生的视频片段,该视频片段由多个帧组成。通常我们从中选取最中间的帧作为关键帧,剩下的个帧作为补充帧输入到 I2P 中。
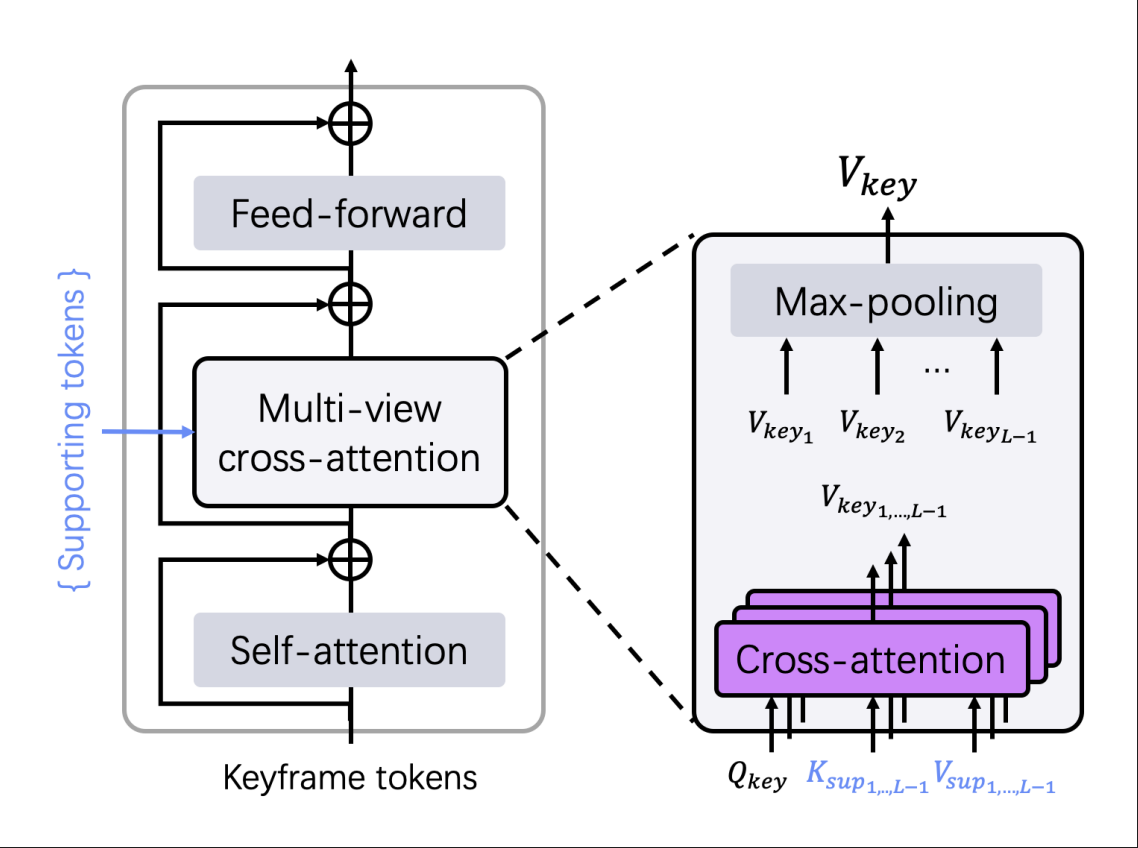
首先,我们将所有帧通过一个由个 ViT encoder 组成的,生成相应的 token ,然后再进行 decoder 操作。具体就是将关键帧的 token 输入到一个特殊处理的 decoder:里(如下图所示),然后剩下的个补充帧共享同一个 decoder 结构(继承自DUst3R,由个 ViT decoder 组成),均生成对应的。
然后,我们再使用类似于DUSt3R中的方法,将这些帧(尤其是关键帧)做出一个置信度最高的三维重建。从而得到某一个视频片段对应的点图。
L2W网络
这个模块接受 I2P 模块产生的作为输入,因为其是一个在线处理方法,所以我们引入了缓冲集这一关键的组分。
首先,我们在已经处理完的关键帧点图中采用reservoir strategy选取个已经注册完的帧作为缓冲集(对于第一个帧这种特殊情况,我们采用了重复运行多次 I2P 获取足够多数量的初始帧作为缓冲集),然后,每当一个新的帧输入时,我们使用一个检索模块(由 I2P 中的 decoder 组成)在缓冲集中将特征的相似度进行匹配,我们然后选取匹配度最高的个关键帧点图,然后将这个关键帧点图 $$ \hat{X}_{i}^{H \times W \times 3},i = 1 , …, K + 1 $$作为这个模块的输入。
如前图所示,我们将这个点图输入到我们的 L2W 模块的 encoder 中:
然后,由于我们实际上不能只通过点图信息来进行建模(如纹理相同的两个不一样的平面或不同的一块地面),因此我们选择将特征与 I2P 网络中的特征融合:
在这之后,我们便生成了每张点图的位置外观特征序列。
紧接着,我们会这个点图输入到两个解码器中:
Registration Decoder
Registration Decoder 将所有 token 作为输入,然后目的是将 L2W 的关键帧重建转换到场景坐标系下,它与采用相同的架构。
解码过程大概是:
Scene Decoder
Scene Decoder 同样将所有 token 作为输入,但是它的目的是在不改变场景坐标系的情况下,精化坐标几何。他同样采用与相同的架构,但是他是对每一个在已选中的关键帧点图进行优化:
通过这样的方式将已生成的 point map 进行优化
最后,我们采用类似于 I2P 模块中的方法对我们所有已经重建的关键帧 token 进行点图重建:
得到一个实时的三维表示。
结论
本人目前涉猎不深,但是论文最后与其他系统做比较,其展现的效率确实令我印象深刻,感觉以上的这个系统的两大模块也令非常简洁舒适。等我再去阅读其他的 3R 文章来进一步理解这个 SOTA 的含金量吧😋
github 项目地址:
喵喵又是充实的一天🥳,本人可能理解有偏差( bushi
SLAM3R读后有感