重返vggt
引言
这是本人在学了一些基础知识并做了一些实验之后, 察觉到之前对于一些经典论文的阅读并不充分, 于是决定重新阅读VGGT一文, 并写下这篇文章, 以供后续查阅.
首先, VGGT 是一个完全的前馈式神经网络用于多目重建任务, 通过 look into 他的代码, 可以看到基本上是没有什么 pipeline 的, 直接将图片输入网络, 然后输出各种三维属性, 并在作者的宣称下, 他们所预测的多个指标在存在 BA 的前提下
均达到
子领域的 SOTA 水平, 这一点非常厉害.
模型结构
VGGT 的 backbone 是一个标准的 transformer 结构, 首先接受大量图片作为输入, 首先通过一个 DINO 提取了分块的 feature, 然后将这些 feature 通过一个主体网络结构(包含了 Alternating frame-wise layer 和 global attention layer)
进行处理, 最后通过多个 task-specific heads 输出不同的三维属性.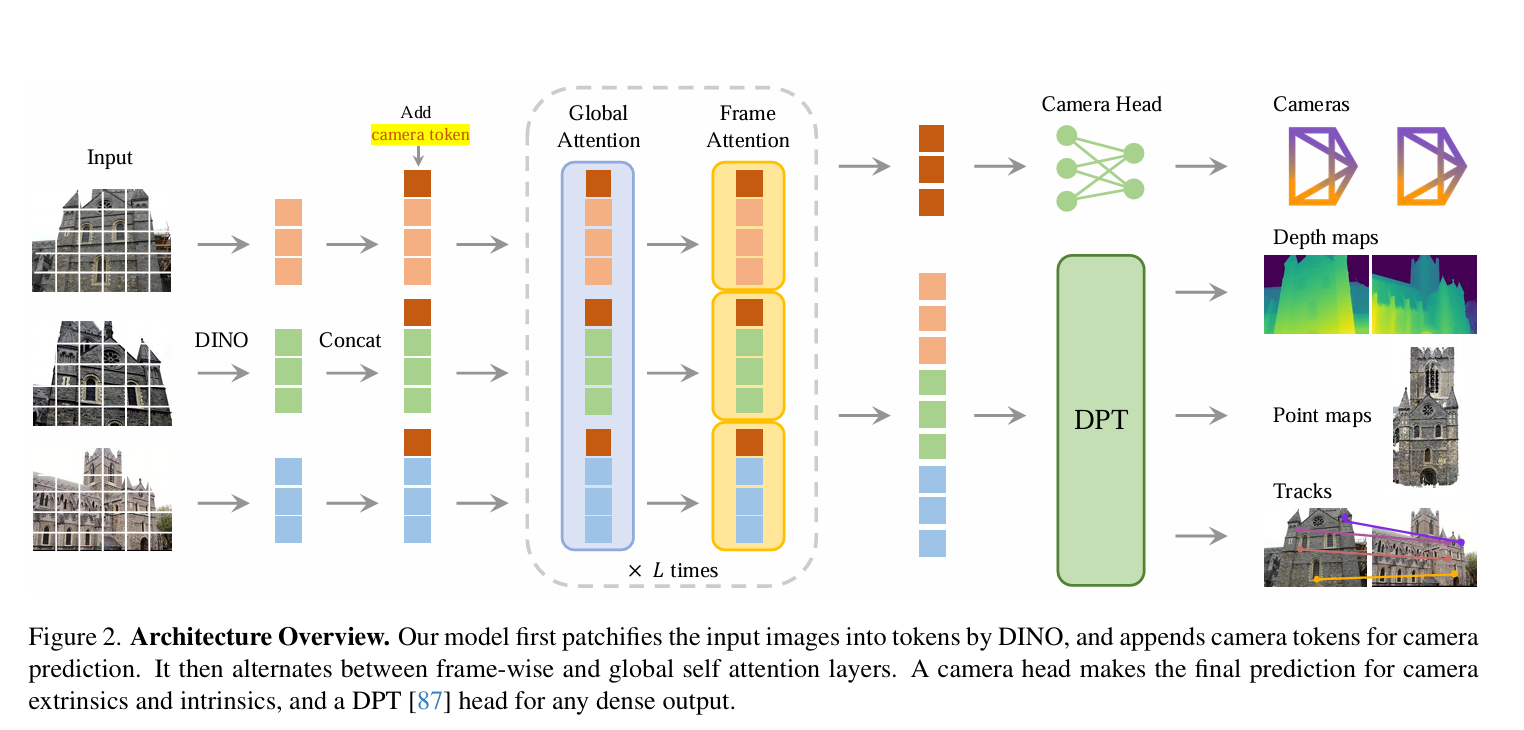
接下来, 我们详细叙述各个细节部分:
Alternating attention frame-wise layer
据文章作者所述, 该 AA 机制与标准的 transformer attention 机制有所不同, 能够使 Transformer 以交替的方式聚焦每一帧和全局.
- frame wise attention layer: 该层的 attention 仅在同一帧内进行, 也就是说, 每个 patch 只能与同一帧内的其他 patch 进行 attention 计算. 这样做的好处是能够更好地捕捉每一帧内部的局部特征.
- global attention layer: 该层的 attention 在所有帧之间进行, 也就是说, 每个 patch 可以与所有帧内的其他 patch 进行 attention 计算. 这样做的好处是能够捕捉不同帧之间的全局特征.
另外值得一提的是, 作者采用了层的 AA 机制, 并通过消融实验证明了 AA 机制的有效性, 此外, 作者声称他们的架构并没有采用 cross attention, 只采用 self attention.
任务特定的heads
将输入的图片通过 backbone 网络处理后, 会得到一个全局的 feature 表示, 然后通过多个 task-specific heads 输出不同的三维属性. 值得注意的是, DINO 编码的 feature 并非直接输入到 AA 中, 而是被添加了一个额外的相机 token
和四个 register tokens进行增强, 然后将作为最终的输入.
此处值得注意的是, 第一帧的输入 token 是, 之后的帧的输入 token 是, 也就是说, 第一帧和之后的帧的 camera token 和 register token 是不同的.
但是作者说他们都是 learnable 的. 这使得模型能够将第一帧和其他帧区分开来, 并在第一个相机的坐标系下表示全局点云以及各种数据.但是, 经过 AA 层之后, 本来被赋予同一初值的 camera token 和 register
token 均会变为帧特定的, 这是因为 AA 层的 frame-wise attention layer 会使得每一帧的 token 在不同的计算中产生不同的表示.
最后遵循常规做法, register token 会被丢弃, camera token 和 image token 会被保留用于预测.
Camera parameter head
这个 head 从上图中的模型的 backbone 就可以看到, 他是将 camera token 通过 4 个 self-attention layers 进行处理, 然后通过一个 MLP 预测出每一帧的相机参数(包含内参和外参).
Dense Prediction
输出的 image token 在这里被使用, 用于预测 depth map , point map 和 tracking features . 更具体地来讲, 首先会通过一个 DPT head 转化为一个 dense feature map
, 之后每一个会通过一个的卷积层解析出 corresponding depth 和 point map. 另外, DPT 头同样也会输出 dense feature map 用于后续的 tracking,
在此同时, vggt 同样也会输出 confidence map 和用于表示 depth 和 point 的置信度. 这个置信度用于后续的模型的 loss 计算和
真实预测时的 conf 输出.
Tracking
这一方面我并不打算去深入了解, 因此先跳过.
Training
Loss function
VGGT 的 loss function 包含多个部分, 主要包含以下几种:
- Camera loss: 这个 loss 监管了相机参数$L_{camera} = \sum_{i=1}^{N} ||\hat{g}i - g_i||{\epsilon}$, 使用了 Huber loss.
- Depth loss: 这个 loss 沿用了 dust3r 的 loss 设计$\mathcal{L}{\mathrm{depth}}=\sum{i=1}^N|\Sigma_i^D\odot(\hat{D}_i-D_i)|+|\Sigma_i^D\odot(\nabla\hat{D}_i-\nabla D_i)|-\alpha\log\Sigma_i^D$
- Point loss: 这个 loss 同样沿用了 dust3r 的 loss 设计$\mathcal{L}{\mathrm{point}}=\sum{i=1}^N|\Sigma_i^P\odot(\hat{P}_i-P_i)|+|\Sigma_i^P\odot(\nabla\hat{P}_i-\nabla P_i)|-\beta\log\Sigma_i^P$
- Tracking loss: 这个 loss 监管了 tracking feature 的质量, 具体细节我并不打算深入了解, 因此先跳过.
因此, 最终的 loss function 为:
坐标Normalization
如果缩放的话, 重建结果应该同样也是正确的, 为了消除这种不确定性, 作者采用了归一化进行处理. 首先将所有量表示在第一个相机的坐标系中, 然后计算所有点的平均欧氏距离, 然后利用该尺度归一化相机平移, 点云坐标和深度值.
值得注意的是, 作者没有对预测结果施加任何归一化, 相反强制模型去学习预测归一化后的值, 这样做的好处是能够使得模型更好地适应不同尺度的场景.
Details
我难以想象训练的规模, 按照作者所述, 这一个 transformer 模型包含了的参数, 在 64 块 A100 上训练了 9 天, 属实是第一次见了.
另外, 训练的数据集之多也是难以想象: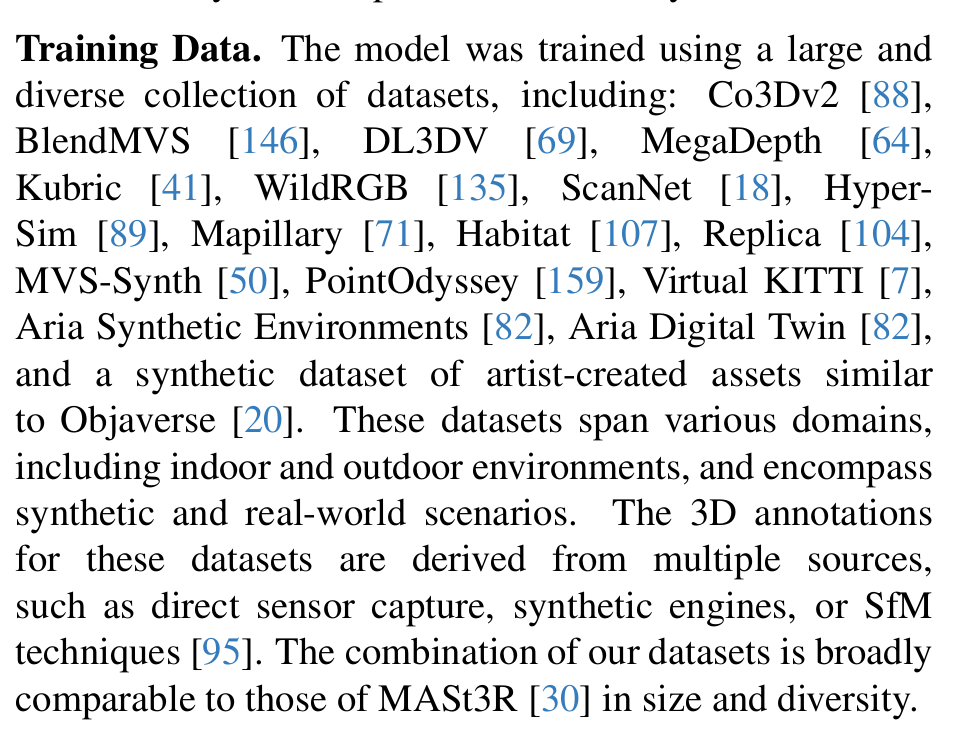
有点离谱了.
结论
vggt 的指标基本上达到 SOTA 水平, 但是值得注意的是, 直接的输出并没有达到, 作者加入了 BA 优化之后才达到了 SOTA, 因为 BA 是一个 costly 的优化过程, 因此我觉着这一方面或许还可以改进? 作者在论文中提到了
应用 diffentiable BA 的可行性, 但是也因为 BA 的计算量过大, 因此并没有进行进一步的尝试.
此外, VGGT 向我们展示了不需要一个复杂的 pipeline 也可以进行高质量的多目重建说你呢, SLAM3R, 我 TM 的快改吐了, 再结合最近发布的 SLAM Former, 我觉着这是一个很有意义的方向.
非常重要的是, vggt 证明了联合预测多个任务是有益的, 虽然并没有在 loss 阶段进行互相的监督, 但是通过多个任务的单独监督, 使得模型学到了更好的表示,
此外, vggt 另一个重要的发现是, 通过 depth 和 pose 反解出来的点云比直接预测的点云要好.
ok, 让我们把仓库链接抬出来:
另外, 这是真的可以的嘛?